![RICOH AP-10A [販売終了]](/wp-content/uploads/img/banner_background.svg)
![RICOH AP-10A [販売終了]](/wp-content/file/industrial-pc/img/ap-10a.png)
AP-10Aは、Windows®を制御するCPU、リアルタイム機能を制御するCPUを別々に搭載しています。
高速なバスによって接続されているため、スムーズな通信を実現しています。
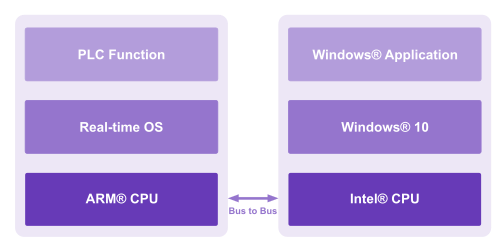
また、Windows®とリアルタイム機能を制御しているCPUが異なるため、Windows®で問題が起きてもリアルタイム側に影響を与えません。
例えば、AP-10Aで動作するWIndows®をシャットダウンしても、リアルタイム側で動作するモーターは停止することはありません。
他社インダストリアルPCの場合
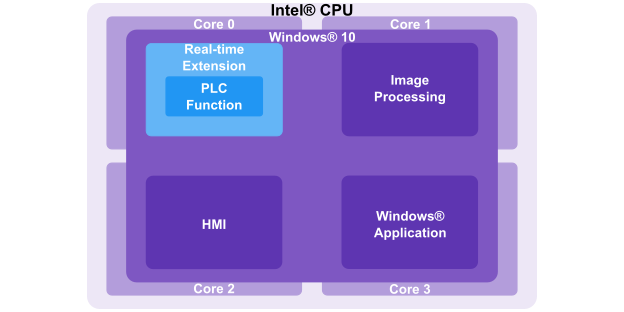
性能は...
Real-time Extensionが1つ以上のCPUコアを占有するので、Windows®側は全てのリソースが利用できない。
安定性は...
Windows®とReal-time Extensionが同じハードウェアで動作するので、安定性が低い。
安全性は...
Windows®が異常終了すると、PLC機能も異常終了。
AP-10Aの場合

性能は...
Windows®側は全てのリソースが利用可能。
安定性は...
Windows®とReal-time OSが異なるハードウェアで動作するので、安定性が高い。
安全性は...
Windows®が異常終了しても、PLC機能は正常動作。
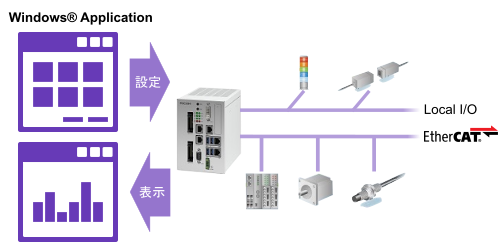
開発環境 「RICOH Process Control System」(以降、RPCS)を搭載。
IEC61131-3準拠のプログラミングをサポートしています。
RPCSにより開発したプログラムは、ARM® 上で動作するため、リアルタイムに制御したいお客様はこちらでの開発が最適です。
C、C#などのプログラミング言語による開発のため、ソフトウェア開発キットをご提供します。
EtherCAT®、Local I/Oなどのハードウェア制御にご利用いただけます。
Windows®での柔軟なGUI開発、ERP/MESなどの上位システムと連携する場合に最適です。
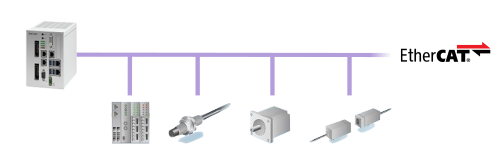
オープンなネットワークで、I/O、サーボモーター、センサーなど様々なスレーブデバイスをご利用になれます。
AP-10Aとスレーブデバイスの接続実績は、サポートページでご確認いただけます。
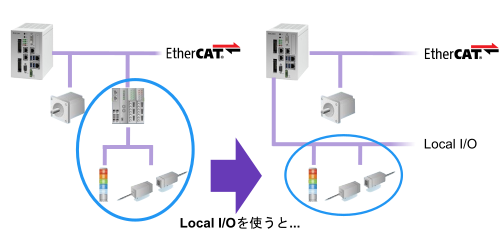
デジタル入力:21ポート、デジタル出力:21ポート、アナログ入力:8ポートのLocal I/Oを標準搭載。
Local I/OからI/O制御やセンサー情報の取得ができるため、別途リモートI/Oの購入は不要、コストダウンが実現できます。
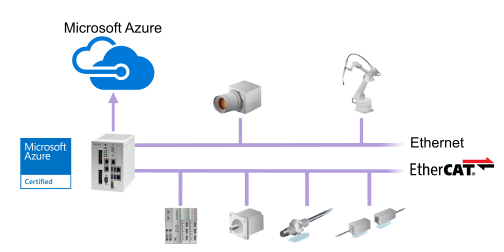
Microsoft Azure Certified for IoTの認証を取得しました。
EtherCAT®に接続されたモーター、センサー、リモートI/Oや、Ethernetに接続されたカメラ、ロボットなどの情報をAP-10AからMicrosoft Azureへ送信することで、稼働状況、分析、データ解析によるフィードバック等を行うことができます。
生産現場の見える化、改善活動を実現したいお客様に最適です。
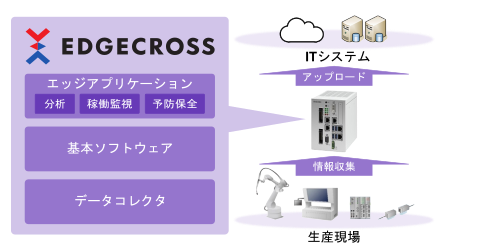
Edgecorss推奨産業用PCの認証を取得しました。
Edgercossプラットフォームをご利用いただくことで、データ分析、予防保全といったエッジコンピューティングを簡単に実現できます。
リアルタイム性が必要な処理や、どうしてもクラウドにあげられない情報を活用したい場合など、Edgecrossプラットフォームで解決できます。
現在、AP-10Aでご利用いただける、EtherCAT®、デジタル入出力などの情報を取得するデータコレクタを開発中です。
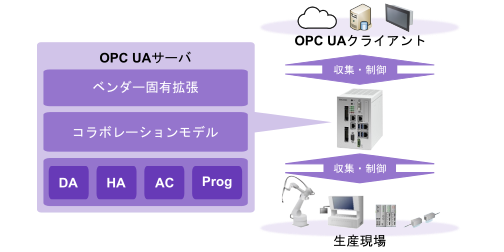
Windows® OS上にOPC UAサーバの実装が可能です。(オプション)
EUROMAPなどのコラボレーションモデルへの対応、お客様独自の機能など様々な対応をご検討いただけます。